



The Demand and Capacity Optimisation for U-space programme (DACUS project) has published its Concept of Operations for “Demand and Capacity Balancing” (DCB) for drones within an urban environment. As part of its studies, the DACUS consortium has estimated how many take off and landing areas (TOLAs) might be needed in Europe over the next ten to 15 years for drones and passenger carrying vehicles.
“As a test case we applied the calculation to the population that is living in the metropolitan area of Toulouse (about 1.2 million people). In total a number of roughly 350 – 450 stationary TOLAs can be expected there.” This suggests that an average of one TOLA for each 3,000 residents in European urban areas, based on the Toulouse case, might be needed by 2036.
The report also looked at TOLA requirements for Madrid and Frankfurt
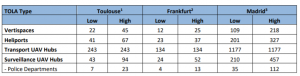

“This allows for a first impression on TOLA numbers that can be expected for large, urbanized areas. Nevertheless, it should be mentioned that this estimation can be further improved in the course of the project. As an example, this calculation does not take into account density specific parameters or additional private services other than transport, which we expect to be the most influential on the stationary hub amount. Also the question of dynamic TOLAs had to be neglected, as the level of complexity is much higher and based on the mission specific drone deployment areas and business cases.”
In terms of demand and capacity balancing, the report has outlined a concept of operations for urban U-space flow management.
According to the report:
“It is built on a series of principles which guide the DCB decisions within the U-space framework. These principles are:
- Application of collaborative decision making to include Drone Operators within the decision making process.
- Prioritizing the fulfilment of mission objectives as a service to Drone Operators when selecting DCB measures.
- Allowing for “free-route” operations whenever constraints allow.
- Minimization of the number of instances in which changes to drone missions are required.
- Incorporation of predictions and the quantification of uncertainty into the DCB process, to increase robustness of DCB measures within a dynamic operating environment.
- Recognizing the operation plan as the “single point of truth” which keeps continuous up-to-date information about the situation and expected evolution of the drone operation.
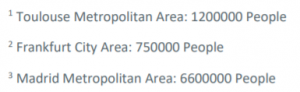
High-level overview of the DACUS DCB service interactions (excluding tactical processes).
Like processes in air traffic management, the U-space DCB process can be divided into five phases: Long-term planning, strategic, pre-tactical, tactical and post-operational phase. The major novelty of the U-space DCB phases with respect to that of air traffic management is the inclusion of the “consolidated demand picture” to separate the strategic phase from the pre-tactical phase. This metric is entirely based on probabilistic estimations of traffic demand, which deviates from the predominantly deterministic and rigid approach to DCB currently employed by air traffic management.
“This could mean that areas with high traffic uncertainty will have a pre-tactical phase which is much closer to the departure time of the vehicle than those areas in which the traffic uncertainty is very low. Subsequently, the time given to Drone Operators to react to (and negotiate) DCB measures is greatly reduced in high-uncertainty areas. This strategy aims to incentivize proactive participation of Drone Operators to provide DCB-relevant information early in the process in order to reduce overall traffic uncertainty, which benefits all Drone Operators aiming to fly in a specific area.
“Additional incentives include the introduction of virtue points to further promote collaborative behaviour among users. Furthermore, given the proximity of drone operations to the general public as well as ground infrastructure, a special emphasis was placed on including risk and social indicators as an integral part of the DCB process. This will assure that overall flight safety and the safety of third parties remains acceptably high and assuring that social impact factors (such as noise, pollution and visual impact) will remain below an acceptable threshold. Finally, the process makes use of the service-centric approach of the U-space architecture to monitor for disturbances within the traffic picture in real-time with support of other U-space services, such as Navigation and Communication Infrastructure Monitoring, disruptions caused by local weather phenomena and any emergencies identified by the Emergency Management service.
“DACUS proposes to address these disturbances through the deterministic, and therefore, predictable management of contingency plans. This will allow U-space to characterize the impact of the disturbance as soon as it is reported and then, implement DCB measures if needed.”
For more information
https://dacus-research.eu/reports-and-downloads/
(Image:Shutterstock/Chesky)