


Tim McCarthy, Senior Lecturer (Dept of Computer Science), Maynooth University (Dublin, Ireland)
In this short article “a commercial drone operator” is taken to mean any qualified drone operator who is licensed to operate a drone for financial reward.
To get a glimpse of what the future might hold for drone operators, we need to step-back and look at the relatively recent past in terms of commercial activities together with the changing, inter-dependent market, regulatory and technology forces that are shaping our global drone industry.
The vast majority of current commercial drone activities revolve around data and information gathering such as videography (real-estate, news-gathering, film-making, events), monitoring (critical infrastructure, search & rescue) and mapping (ortho-mosaics, 3D modelling) – all of which are carried out in a localised Line of Sight (LOS) setting by a professionally qualified drone operator. This situation is due, by and large, to the hyper-localised regulatory regime controlling current commercial drone operations.
Although experiencing massive growth in the initial years, this data gathering market is probably beginning to mature and stabilise. If we take commercial drone operators or remote pilots numbers in the USA as an example, forecasts over last few years have projected significant growth in the commercial drone operator population but these increases have been questioned in recent online articles by Colin Snow and Patrick Egan.
All market and technology trends point to a futuristic world of, not only data and information gathering, but also Urban Air Mobility (UAM) such as air taxis whizzing us across town and deliveries of products from food to latest gadgets to our homes. This huge interest in the potential $1.5Trillion Urban Air Mobility market is evidenced by the increasing intensity of these operational/technology development activities in cities and urban spaces across the globe, as reported recently by Unmanned Airspace; 39 City urban drone projects and Urban Air Mobility takes off in 64 towns & cities.
The big bust: LOS to BVLOS
However, to make this significant operational step-change to longer-range dense drone traffic scenario which, includes UAB, drones will need to operate beyond visual line of sight (BVLOS) – in most cases at least. Therein is the bust. For drones to operate BVLOS – assuming a reasonable reliable flying platform – only technology (sensors, connectivity, computation) can keep them out of trouble and ensure these drones fly from A to B safely. In a lot of these scenarios there will be no need to have a human-in-the-loop and indeed, in some cases it will have safety implications.
Let’s take the Urban Air Mobility sector, where we may have tens, hundreds, possibly more drones, in relatively confined airspace over a major city at any one time – how is this supposed to work? Does each drone have an operator? For standard missions, does each drone operator consult his/her airspace map, comprising various data layers, interprets best route, considering various dynamic and static hazards, vulnerable zones, severity and probability factors? Do pilots then contact some central control to secure their preferred route and this same central controller ensures efficient routing and safe separation? Does this route need to be risk assessed? How can a controller handle multiple criss-crossing paths at busy pinch-points in urban airspace? Does the controller relay en-route instructions to the operator who, in turn, uploads these commands to the drones? How do controllers/operators de-conflict traffic in a reasonable time-frame? What happens when an emergency event has to be handled e.g. MedEvac helicopter needs to descend into busy down-town drone airspace? All of this would result in chaotic traffic scenarios across the city with traffic conflicts building-up quickly at pinch-points, drones having to fly extended routes to avoid traffic congestion, drones running low on battery power, potential misunderstanding and overloading when human operators try to manage traffic issues in real-time, poor handling of emergency events. There are big challenges in terms of time-critical actions and response. Should urban airspace be structured and managed from a centralised system?
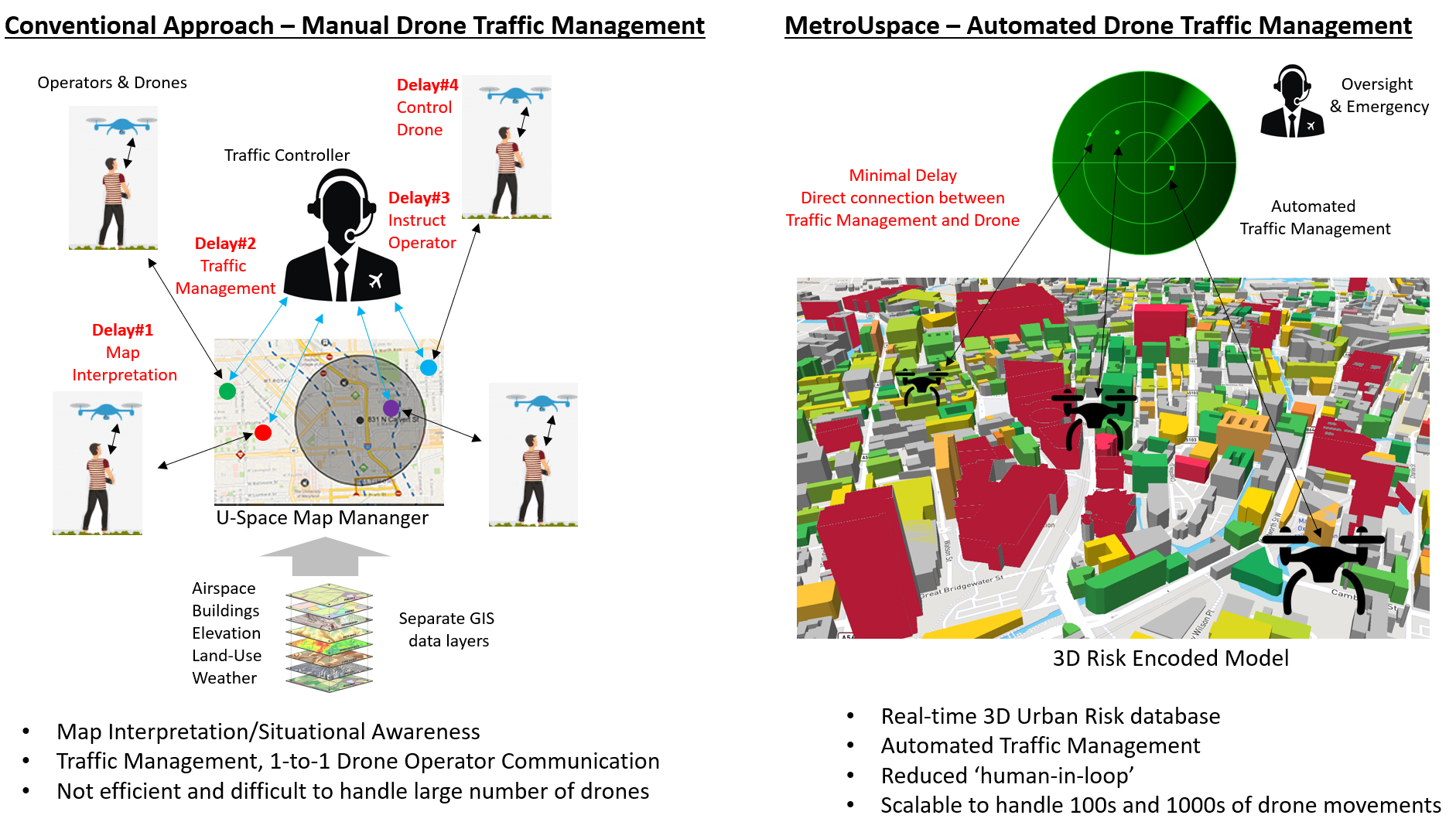
Certainly, for dense BVLOS drone operations, it would seem that a centralised, automated traffic management system is required – not solely because optimised routing and spatial-temporal de-confliction requires relatively complex computation but also the ability to scale and handle large numbers of simultaneous trajectories. Handling a handful of drones in a localised airspace scenario is perfectly manageable by humans but scaling this to tens and hundreds of drones (with typically limited battery storage) will not really work. Why have a human controller when an automated traffic management system can compute routing and de-confliction strategies a lot faster? Why have drone operators in the loop when these instructions can be relayed directly to the drones themselves? This same logic may apply to where a number of drones are tasked with some collaborative, intricate operations for example, carrying out a collaborative search and rescue mission – where drone patterns may be offset both geographically and temporally – this may be best carried out using automated traffic management. Similar examples apply to other scenarios such as collaborative drones carrying out routine critical infrastructure inspections missions.
Automated drone traffic management systems of the future
The drone industry has to play the smart game for high-density BVLOS, or specialised drone operation and ensure that technologies such as onboard sense and avoid, ground-based traffic monitoring systems, 4G/5G connectivity, 3D risk models, Machine Learning, cloud and edge computing are integrated and configured to ensure best safety and operational outcomes for various drone services.
U-Space Services and UTM cover a range of functions from e-Registration through to detect & avoid and ATM Interfacing. U-Space/UTM designers have pointed to the need for automated traffic management but have not really bitten the bullet in describing how these might look; system architecture, fundamental components, essential functions, performance metrics, standards etc.
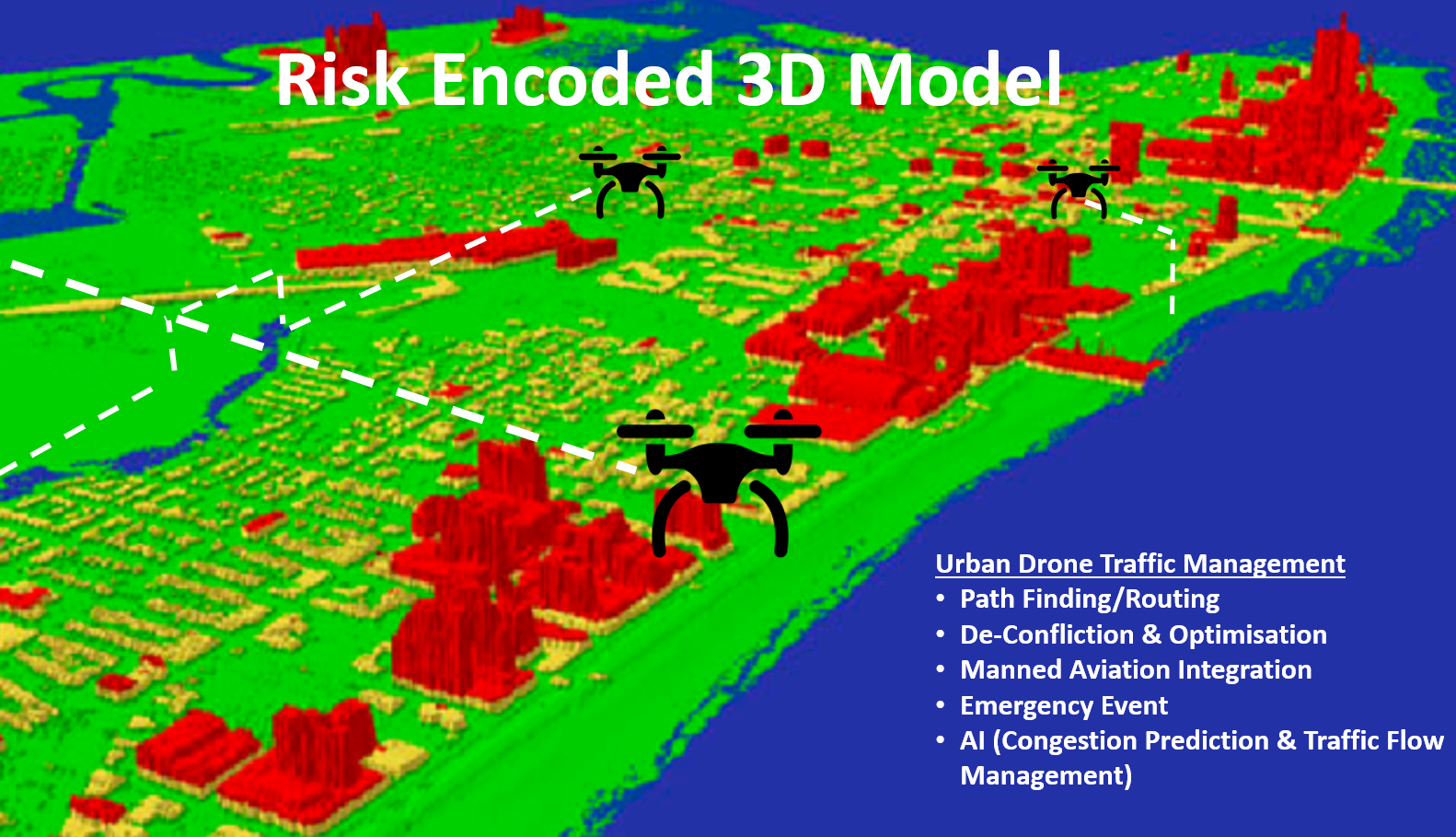
This may require new ways of thinking how we collate airspace information for drone operations – which is currently designed primarily for human end-users. Does present day data collation, structuring, fusion techniques need to be modified to ensure that a more efficient 3D risk database is produced, resulting in information can be readily understood not just by human operators but by drones themselves – this idea is not too dissimilar to HD Maps and Autonomous Vehicles.
Trajectory routing, de-confliction strategies, optimisation, emergency event handling, congestion prediction and traffic flow management – all components of drone traffic management – can benefit from latest geocomputation machine learning and distributed computing techniques. Can some of the computational load be federated and shared amongst the network of connected computing nodes i.e. drones themselves, reducing single point of failure?
Do we need to re-consider the overall make-up of U-space and UTM eco-system in these high-density BVLOS traffic scenarios? How are U-Space services configured and delivered, are these entities a specialist supplier for example, ground based traffic monitoring or supplier of Vertiport/Drone base station services or can one supplier provide all systems and services. Does it make sense to have multiple U-Space traffic management service providers or just one for any defined City Airspace. Should Urban Air Mobility airspace be defined as <1000’ and declared as “Drone Airspace”. Who needs to be involved in overseeing the rollout of Urban U-Space services (NAA, ANSP, City Managers, Civil Society etc) – is this oversite function more suited to a public-private partnership? Do drone owners and drone fleet service companies hand-over their drones to the U-Space or UTM to operate? What are their respective operational roles, responsibilities also – what about other aspects e.g. insurance implications?
The future role of commercial drone operators in providing services under dense-traffic BVLOS or specialist conditions is likely to change with an increase of automated traffic management systems and a decrease in the requirement for drone operators.
About Tim McCarthy:
- Research Areas; Geospatial Science, Geocomputation, Earth Observation, Sensor Technology, Cloud Computing, Unmanned Aircraft Systems (Drones)
- Principal Investigator SFI Strategic Partnership U-Flyte http://www.u-flyte.com/ – Researching highly automated Drone airspace systems
- Staff page Link: https://www.maynoothuniversity.ie/people/tim-mccarthy
About U-Flyte
U-Flyte is a strategic research partnership, coordinated by Maynooth University and funded by Science Foundation Ireland, together with key industry collaborators including Airbus and Irelandia Aviation. The project was launched in March 2018 in Waterford Airport by Maynooth University, SFI and industry partners.
(Image: 3D Risk encoded airspace model that can be queried and understood by both drone and human operators)