



Karel Callewaert, Senior Consultant, VVA
VVA, together with GMV and CATEC, has been contracted by the European Commission’s DG GROW to provide support to the standardisation actions for European global navigation satellite systems (GNSS) EGNOS and Galileo in the drone/RPAS/UAV sector. This project was launched in September 2018 and ran until the end of September 2019. It falls under the overall context of the Space Strategy for Europe, adopted by the Commission in October 2016, and focuses on the aviation segment, more specifically on drones. The project is a contributor to the U-Space Network of Demonstrators set up by the European Commission.
Earlier trial results can be found here.
On the 25 and 26 of June, the third drone trial of the EGNSS4RPAS took place in the urban environment of Villacarrillo (Spain), putting the UAV in a more demanding environment compared to the previous two which were held at the ATLAS facilities nearby. Over the two-day timeframe, a single multicopter UAV was used to perform 10 different flight plans with the following main objectives:
- Compare the different GNSS positioning outcomes (i.e. GPS only, GPS and EGNOS, GPS and Galileo, GPS and Galileo and EGNOS), focusing on accuracy and integrity provided in the urban environment;
- Analysis of the static geo-fencing suitability to understand how close the drones can fly near the forbidden volume in the urban environment.
Main conclusion on accuracy
Based on the technical analysis that followed these different flight plans, several conclusions have been derived (see table and figure below for more information). Despite having fewer satellites available, the Galileo-alone solution already provides significantly better performances than the GPS-alone solution. However, the performances for the combined GPS and Galileo solution yield an even greater improvement versus the GPS-only solution.
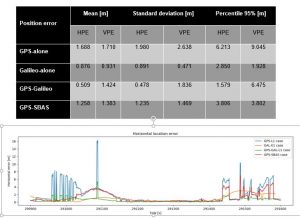
Figure 1: Flight Plan 3 – Single frequency results and graph on horizontal error
Another observation across the different flight plans is that although adding EGNOS in the solution provides improvements compared to GPS-only (both on the horizontal and vertical level), GPS and EGNOS does not provide better performance than GPS and Galileo.
Performance is in general very stable for the in-flight phase. Error spikes correspond to the take-off and landing phases, where the multipath and satellite visibility clearly impact the performance.
Main conclusion on integrity
The achieved Protection Levels (PLs) with the single frequency (SF) solutions both at the horizontal and vertical level are in general below the minimum requirements as defined for aviation LPV-200.
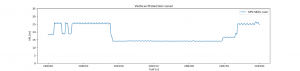
Figure 2: Flight Plan 9 – Vertical PL for SF
Main conclusions on availability
For the SF GPS and Galileo solution, 100% of availability was achieved for all flight plans. The chart below provides an overview of the number of satellites that were visible during the trial. Satellite visibility is key for the solution’s availability.
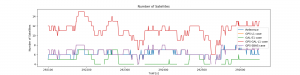
Figure 3: Flight Plan 6 – Satellites used by SF solution
Summary of conclusions
Following the analysis of all 10 flight plans for both the single and dual frequency solutions, the following conclusions and recommendations can be drawn:
- Satellite visibility has proven to be a key driver for the solution’s availability and overall performance in the challenging urban environment. Galileo on top of GPS improves dramatically the availability and robustness of the GNSS solution.
- Across all flight plans, the GPS and Galileo solution showed superior performances in terms of accuracy than single-constellation solutions or GPS and EGNOS.
- For the in-flight phase, protections levels provided by EGNOS are a differentiator vis-à-vis other GNSS solutions and a potential enabler of critical applications requiring high levels of integrity.
- European GNSS solutions have demonstrated to be a pivotal element for the safety of drone operations in cities, boosting the drone business and the public acceptance.