


Japan’s New Energy and Industrial Technology Development Organization (NEDO), NEC Corporation, NTT DATA Corporation, Hitachi, Ltd., ZENRIN CO., and Japan Meteorological Association are developing a UAS traffic management (UTM) system for further operational assessments by February 2020 following the successful completion of a data-sharing trial, with multiple drone operators sharing critical flight data, in October 2019.
According to NEDO:
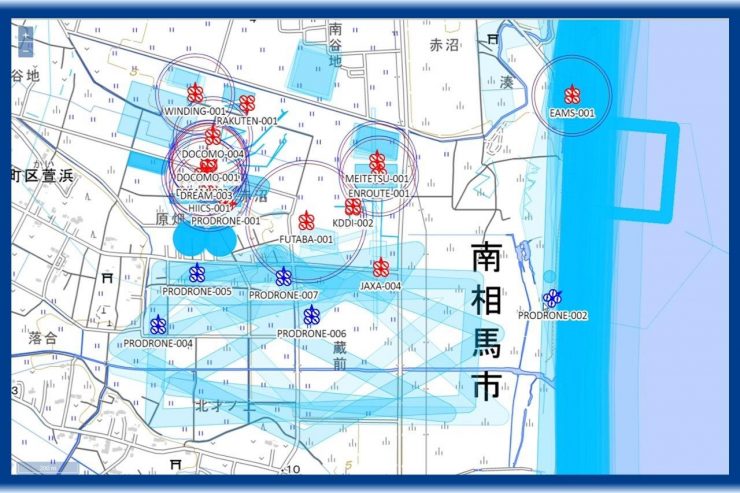
“NEDO is driving a major R&D project to develop traffic management systems for drones. As part of this project, NEDO, NEC, NTT DATA, HITACHI, ZENRIN, Japan Meteorological Association, and JAXA cooperated with Fukushima Prefecture, Minamisoma City, and the Fukushima Innovation Coast Framework Promotion Organization conducted an interconnection test with a drone traffic management system for safer flights by multiple operators in shared airspace, and completed 100 flights per square kilometer per hour. In total, 29 drone operators participated in the test at the Fukushima Robot Test Field.”
“Each participant tested interconnection with a drone traffic management system that handled information sharing among multiple drone operators relying on an Integrated Traffic Management function server installed in the operations control centre of the Fukushima Robot Test Field, as well as the APIs and API connection support services of the drone traffic management system. In addition to seventeen NEDO Project members, twelve general drone operators participated in this trial. The participation of ordinary drone operators in this test proved the usefulness of the drone traffic management system and the effectiveness of security measures for interconnection.”

As part of the NEDO Project flight control devices were fitted on board the drones to report the position and speed of drones to the traffic management system during flight.
“In the October interconnection test, the Integrated Traffic Management Function and the Information Provision Function were connected via a network so that general drone operators not involved in the NEDO Project could participate. To improve the security of the network, firewalls and intrusion detection systems (IDS) were installed, authentication keys were distributed to the providers connecting, permitting only approved operators to connect. In addition, managing flight plans and flight conditions assuming multiple simultaneous drone use cases such as multiple drone weather observation, and multi-drone formation flights for delivery. The NEDO Project also verified and evaluated the use of airspace and flight rules for the safe operation of these drones through traffic management simulations.”
According to NEDO the results of this interconnect test on individual technologies were as follows:
- Sky Perfect JSAT Co., Ltd. conducted flight tests assuming BVLOS flight in disaster damaged areas or areas where ground communication environments are not operational, and verified that they can receive position and flight condition data of satellite drones and control via communication satellites from the direct flight control function in real time.
- NTT DOCOMO, Inc. provided in-flight traffic management functions using mobile communication network (LTE) over the air, and assisted seven of the 21 flight test teams with the connection of the integrated traffic management function. The traffic management device onboard drones is only about 60 grams, making it easy to install even on small drones.
- Hitachi, Ltd. and Japan Information and Communications Research Institute developed a location sharing device with multi-hop communications that enables long-distance BVLOS flight of multiple drones. By cooperating with the integrated traffic management function and the information provision function, Hitachi, Ltd. demonstrated safe and reliable delivery using multiple drones that assumes the use of a kind of drone highway.
- SUBARU/ Nippon Radio Co., Ltd., Nippon Avionics Co., Ltd., Mitsubishi Electric Corporation, and Autonomous Control Systems Laboratories demonstrated that systems equipped with collision-avoidance technologies currently under development under a separate effort with NEDO can interconnect with the drone traffic management system. As a result, the aim was to integrate the UAS traffic management system with collision avoidance technology.
- JAXA developed a UTM simulator that simulates the operation of multiple drones and evaluated the drone traffic management system. In this test, JAXA connected a part of the simulator to the drone traffic management system and verified deconfliction of drone traffic to avoid mid-air collisions.
In future operations the NEDO Project plans to improve the user interface so that many more operators can easily participate in interconnection tests.
For more information