


VTT Technical Research Centre of Finland has published a paper investigating a hypothesis that the best way to defend efficiently and affordably against a drone swarm is to use another drone swarm.
The paper describes a ConOps for a counter-swarm scenario in which the defender side uses a swarm of drones to defend a target against an attacking drone swarm. A preliminary version of the ConOps for a counter-swarm scenario was drafted through a counter-swarm simulator and discussions with military experts of the Finnish Defence Forces.
In nature, the species that most successfully resist an attack by social insects (the original inspiration for autonomous drone swarms) are other social insects. Both sides have the same characteristics in terms of their intrinsic ability to self-organise in response to highly dynamic circumstances, based on incomplete information and without any centralised control structure (and the vulnerability associated with it). The end goal of this project was to identify methods for adapting the collective intelligence paradigm to swarm tactics, and to develop conceptual, analytical, and numerical tools to evaluate performance in defence applications.
Authors Fabrice Saffre, Hannu Karvonen, Jari Laarni, Toni Lastusilta, and Antti Väätänen explored the interaction between individual autonomous units operating simultaneously within each other’s sensing and actuation range. In this context, the investigation of interaction patterns between multiple swarms that may have different, possibly mutually exclusive goals presents a substantial scientific and technical challenge. Of relevance to the defence sector are the dynamics of a confrontation between two autonomous swarms, one of which is trying to reach a predefined target (the attacker) and the other to prevent it (the defender).
Many examples of this type of swarm vs. swarm confrontations exist in nature and can be used as blueprints to define stochastic, rule-based decision systems that, when applied independently (but sometimes based on shared information) by individual autonomous units, can foster the emergence of a collective response to the threat posed by the other swarm. This hypothesis forms the basis and justification for the CounterSwarm project, of which objectives, methods, results, and conclusions are summarised in this report.
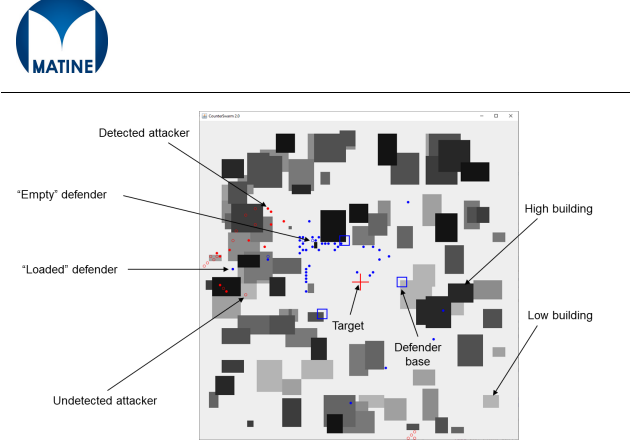
(Image: CounterSwarm simulator’s situational picture)
For more information visit: