


By Mehrnaz Sabet
A NASA-funded Cornell University project is developing infrastructure and services to support the next generation of autonomous, cooperative airspace operations, combining tactical drone-to-drone coordination with live hybrid testing environments that can recreate dense, dynamic and safety-critical operating conditions.
Project Orion addresses a central challenge for future UAS traffic management: how to move beyond high-level flight planning and isolated collision avoidance toward an airspace system in which autonomous drones can coordinate tactically, adapt to disturbances and be tested under realistic operational stress before deployment. Dense BVLOS, delivery, public-safety and advanced air mobility operations will need an intermediate tactical layer where aircraft can exchange intent, sequence locally, resolve conflicts and recover from disturbances in real time.
V2V-based tactical deconfliction services
One part of the Orion effort is focused on tactical deconfliction services based on vehicle-to-vehicle coordination. In collaboration with Qualcomm, the Orion team is testing an early prototype of airborne V2V communication for drones, exploring how autonomous aircraft can exchange information directly to support coordinated low-altitude operations.
The objective is to support the operational layer between pre-flight strategic planning and last-resort collision avoidance. In this layer, drones can share short-horizon intent, local state, awareness information and event-driven coordination messages that help them maintain safe, efficient movement through shared airspace.
This becomes important when conditions change faster than strategic planning can absorb, including unexpected congestion, blocked routes, degraded communications, emergency traffic, mission priority changes or unplanned obstacles. Orion treats V2V coordination not simply as awareness broadcast, but as a tactical service layer for intent exchange, local sequencing, conflict resolution and safe degradation before conflicts become emergencies.
Live validation infrastructure for complex drone operations
Orion is also developing real-time validation infrastructure for autonomous drone operations.
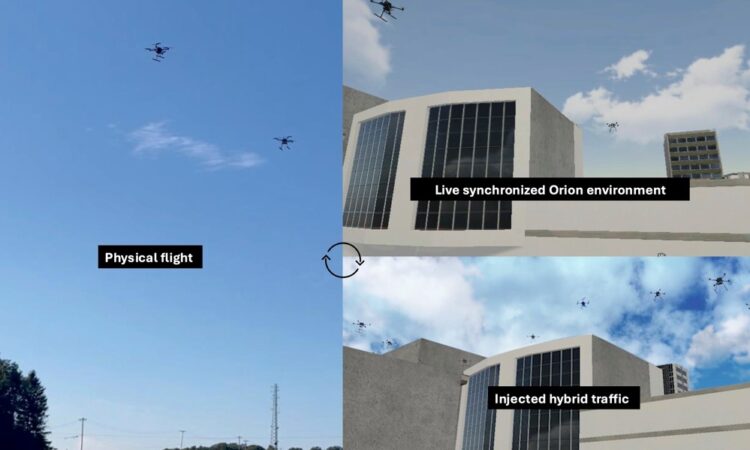
The platform combines simulation, field testing, vehicle-to-vehicle communication and hardware-in-the-loop validation. Physical drones flying in an open test field can interact in real time with a simulated city-scale airspace containing virtual aircraft, buildings, obstacles, operational constraints, emergency scenarios and degraded communication conditions.
This creates a mixed real/sim environment in which operational complexity can be exercised through physical flight. Real drones can interact with dense urban conditions while flying in a controlled field setting, allowing researchers and operators to test scenarios that would be difficult, expensive or unsafe to reproduce directly in public airspace.
The purpose is to close the gap between offline simulation and operational deployment. Offline simulation is useful for large-scale evaluation, but it does not fully capture the interaction among real hardware, onboard autonomy, communication links, timing effects and live operational decision-making. Conventional field testing, meanwhile, is limited by the number of aircraft that can safely be flown and by the complexity of scenarios that can be reproduced.
Orion links these worlds by allowing real aircraft, simulated traffic, environmental complexity, communication effects and operational disruptions to be exercised together in the same live environment. This makes it possible to evaluate how autonomy and coordination systems behave under realistic stress before deployment at scale.
Building evidence for future UTM and AAM operations
The Orion project is designed around the idea that future UTM and advanced air mobility systems will need credible evidence before autonomy can scale. The key question is not only whether one aircraft can complete one mission, but whether many aircraft and operators, potentially using different autonomy stacks, can safely share airspace under realistic operational complexity.

Orion’s simulated urban airspace environment is used to evaluate drone V2V communications and data exchange, trajectory conflicts and tactical deconfliction behavior under controlled, repeatable conditions. Image credit: Project Orion / Cornell University]
The project has conducted more than 231,000 runs, approximately 120.5 million executed flight trajectories, and 15,695 hours of experimentation to study high-volume UTM and mixed airspace operations. A recently released technical report, “Tactical Separation Provision in High-Volume UTM: Evidence, Requirements, and Communications Architecture for Mixed Airspace,” presents a major output from the Orion effort, with additional publications and technical outputs planned as the work continues.
Orion’s validation infrastructure has also been used to recreate and stress operational scenarios, including delivery operations, dense airspace interactions, incident-informed conditions, wildfire monitoring and emergency-response missions. These scenarios help evaluate how autonomy, communication and tactical deconfliction services behave under conditions that are difficult to reproduce in conventional field testing alone. Orion’s approach is to make these conditions testable before they are encountered at scale, providing a proving ground for future airspace autonomy.
Toward autonomous cooperative airspace
The long-term vision behind Orion is an airspace system in which drones do not operate as isolated vehicles following static plans, but as participants in a cooperative operational environment. In that environment, strategic services, tactical coordination, vehicle autonomy, communication systems and validation infrastructure must work together.
Project Orion is advancing this vision by developing both sides of the problem: the tactical services needed for drones to coordinate in real time, and the infrastructure needed to test those services under realistic and repeatable conditions.
As low-altitude operations become denser and more diverse, Orion is being built to help future UTM systems support not only where drones plan to fly, but how they adapt when the operating environment changes.
Mehrnaz Sabet is the Principal Investigator and technical lead of Project Orion.
For more information
Project Orion website: https://www.projectorion.info/
Technical report: https://doi.org/10.7298/1c7q-nq81
(Image: Project Orion synchronizes physical drone flights with a live simulated airspace, allowing real aircraft to interact with virtual traffic, obstacles and operational constraints in real time. Image credit: Project Orion / Cornell University]