

Flytebase (https://blogs.flytbase.com/precision-landing-solution/) has announced the launch of FlytDock, a smart vision based automated precision target landing solution compatible with a wide range of drones. It offers the ability to autonomously land or hover a drone over a visual target for delivery, docking station, warehouse or asset inspection, even in GPS-denied environments. Powered by FlytOS, this intelligent plugin utilizes computer vision techniques and dedicated landing algorithms to precisely align, approach and land the multirotor on the ground.
“With FlytDock, we have been able to assist our customers looking for a robust and reliable solution for precision landing on docking/charging stations, for security, delivery and inspection applications,” said Nitin Gupta, CEO of FlytBase.
According to the company: “The issue arises when trying to attempt an autonomous multirotor landing, solely assisted by the GPS, as it always comes with an error radius of a few meters, often called the ‘last 10 ft problem’, where traditional GPS is not accurate enough to navigate the drone precisely to the landing location. This is a major issue, as while working with relatively small objects, like drones, which are often less than a meter in size, the error margin offered by a GPS-based landing solution is unacceptable. Even with RTK GPS, it is extremely hard to precisely align and land on target. Further issues arise when the landing pad/docking station is in motion, or there are multiple landing sites, as the higher precision required to land the UAV in such cases, simply cannot be delivered by a GPS guided system. GPS alone is not accurate, IR-beacons get affected by ambient conditions and need power on the landing site, RTK-GPS is complex to setup, requires additional infrastructure and still does not provide the desired performance.”
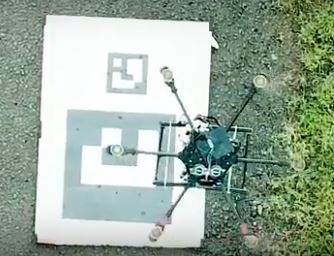
FlytDock consists of an onboard module which uses a downward looking monocular camera to detect fiducial markers. These markers (ArUco Tags) can be printed and used as landing sites. There is no infrastructure/electronics required on the landing site, making it easy to deploy at scale. The pose is estimated using the tag size and calibrated camera information. No other equipment, such as lidar or rangefinder, is required, as the altitude and location of the landing site are found just using the pose estimation of these markers. The onboard controller maneuvers the drone, precisely to the desired landing site using FlytAPIs.
A family of ArUco markers allows the use of different tags for multiple landing sites. Different markers can be used and modified in size to fit the landing pad. The height for triggering precision-landing procedure can also be modified in software, to sync with the size of the marker.
