


The US National Aeronautics and Space Agency (NASA) has published an overview of its Extensible Traffic Management (xTM) research covering low altitude below 400 ft to high-altitude operations over 60,000 ft (designated as upper Class E airspace in the US). The article describes the evolution of NASA Unmanned Aircraft Systems (UAS) Traffic Management (UTM) to xTM, where the foundational UTM requirements and core properties are generalized to become xTM requirements supporting operations of new entrants beyond small UAS.
The article identifies planned research to examine the potential interactions with Air Traffic Control (ATC) across multiple xTM systems, such as Unmanned Traffic Management (UTM), upper Class E traffic Management, ETM, and Advanced/Urban Air Mobility, AAM/UAM. This work is one of the steps for improving interoperability between the xTM systems and ATS, which is critical for safe and efficient sharing of the airspace among the new entrants served by the xTM systems and conventional ATS-serviced operations.
NASA has generalised the foundational UTM requirements and core properties to become Extensible Traffic Management (xTM) requirements to support operations of new entrants. Pioneering ATM architecture is being developed in NASA’s Aeronautics Research Mission Directorate (ARMD) Air Traffic Management-eXploration (ATM-X) project.
The article describes core properties of xTM, including the flight information management system (FIMS), the UAS service supplier (USS), Discovery and synchronization service (DSS), and Supplemental Data Service Provider, SDSP.
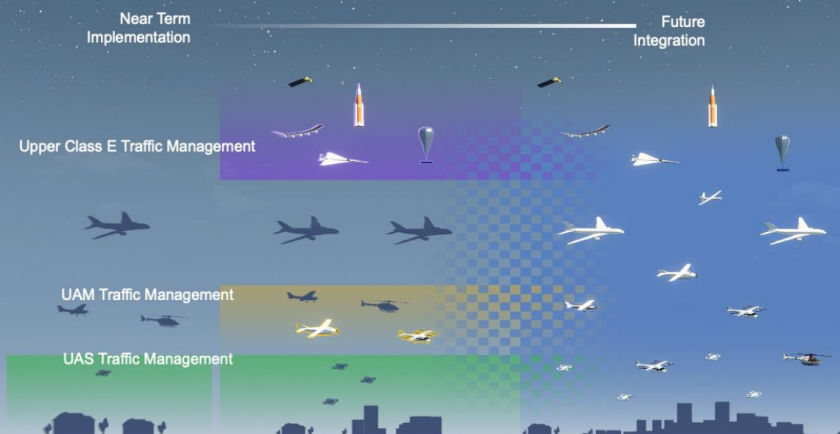
In the FAA’s vision for the future of aviation, xTM systems are part of the ATM system, alongside conventional ATS. The different xTM systems are expected to serve different sets of missions and flight profiles with diverse vehicle performance characteristics. In the early implementations of xTM (i.e., UTM, UAM Traffic Management, and ETM), the vehicles are expected to operate in separate, designated airspace that are not occupied by existing traffic, and transit in and out of the conventional ATS environment could be done with limited interactions with existing procedures and tools. However, better integration of diverse xTM operations with conventional air traffic will be needed as the xTM traffic increases in the future, which will allow for more efficient use of airspace with harmonized seamless interaction between current and new entrants. In a future with more integrated operations and higher xTM traffic density, xTM vehicles will likely need additional advanced coordination support services to handle the complex interactions between a diverse set of vehicles operating within highly overlapping airspace and operations.
NASA is also planning to examine the potential xTM-ATC interactions across multiple xTM systems and identify common procedures, ATC roles/responsibilities, and data exchange requirements across different xTM-ATC interactions under similar scenarios and trigger events. This work is one of the steps for improving the interoperability between the xTM systems and ATS and a development of new coordination services for future integrated operations. The examination of xTM-ATC interactions and the development of coordination services is critical to achieve scalable, safe, and efficient operations that seamlessly co-exist with traditional vehicles in highly integrated future air traffic operations.
For more information visit: